A short Description of the ParticleScope™ Instrument
![]()
This non-destructive particle detection and measurement system appears simple but is very versatile.
The Phoenix Imaging ParticleScope™ System provides the next great advancement in non-destructive testing for the detection and measurement of contaminating particles in clear solutions. The technology is the result of a ten-year development effort and is protected by U.S. & International Patents, 5,365,343, 5,694,221, 6,498,645, 7,310,143, 7,391,515 & 7,430,047 and other patents pending. The system provides an accurate NIST traceable linear relationship between maximum particle size and the probability of its detection. The ParticleScope™ System provides unique capabilities that are not available in any other instrument of its kind. The functional design of the instrument concentrates on two primary tasks, 1) the non-destructive detection of contaminating particles in solution and 2) a NIST traceable measurement of the particle size (equivalent diameter if the particle is within the aspect limits). The system has a useful measurement range of 50 µm to 1000 µm. The optical system is optimized for the detection of visible size particles, a size range that previously required a calibrated microscope operated by a skilled technician. The art of detection has been advanced with the implementation of this technology. Several factors contribute to the ability to detect the presence of contaminating particles in solution. Product handling, agitation method, illumination conditions, sensor field of view, detection angle, and the sensor resolution are just a few of the important criteria that must be addressed in order for the instrumentation to function properly. If any factor is compromised the reliability of the instrument will be questionable and possibly jeopardize the ability to validate the inspection process. The basic premise of most commercially available automatic visual inspection systems is that the equipment relies on the ability to identify differences between one or more images. In other words, the system searches for things that whose signal differs from that of the average scene illumination. The present commercially available inspection systems can be described as a binary detection systems.
“Detection” is not “Measurement”
The ParticleScope™ System uses patented technology which evaluates the total energy found in both the focused image and the blur surround within a three dimensional envelope to obtain its demonstrated NIST traceable maximum particle size accuracy.
It is assumed that only items of interest (contaminating particles) are the only differences that are isolated. A system that detects the presence of a contaminating particle may not report a consistent “detection level” when the same product is examined a second time. This is by far the most difficult problem for a reliable inspection system to overcome.
It has been demonstrated that a relationship exist between the intensity of the illumination source and size of the particle that is detectable by the human eye. A similar analogy exists between the image sensor of an automated detection system and the size of the smallest detectable particle. Hence the more consistent the illumination source, the more consistent the resulting detection signal.
 The direction of illumination will influence the detection of the particle. It is very difficult to uniformly illuminate a cylindrical object. It is even more difficult to illuminate the interior of liquid filled cylindrical container in which the index of refraction of the contents is different from the surroundings (air). The cylindrical container tends to act like a lens and will distort the apparent size of an object inside its volume. This phenomenon makes the task of consistently detecting a contaminating particle as it transverses the field of view difficult and the measurement of its size even more so.
The direction of illumination will influence the detection of the particle. It is very difficult to uniformly illuminate a cylindrical object. It is even more difficult to illuminate the interior of liquid filled cylindrical container in which the index of refraction of the contents is different from the surroundings (air). The cylindrical container tends to act like a lens and will distort the apparent size of an object inside its volume. This phenomenon makes the task of consistently detecting a contaminating particle as it transverses the field of view difficult and the measurement of its size even more so.
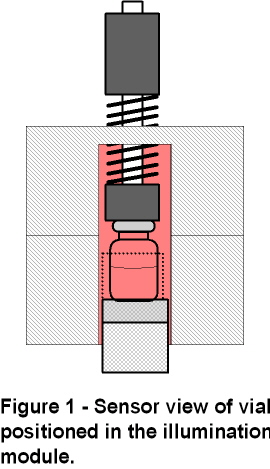
Despite its compact size (30″ x 30″ x 19″), this versatile particle size analysis system detects the presence, absence, position, size and number of particles in a container. Detailed image information is acquired using a high resolution progressive-scan CCD sensor mounted and precisely aligned with optical components within a sealed sensor enclosure. The optical path of the sensor is positioned such that the entire bottom of the container is exposed. A special illumination module equipped with nearly 1,000 matched LED’s provides a uniform illumination field. The illumination module is position so that the optical axis coincides with the axis of rotation. The illumination module is raised and lowered using a self-contained linear actuator providing easy access to the sample holding puck. The sample holding puck is attached directly to a low inertia, high torque stepper motor drive. All major components with exception of the image processor are contained in the base unit.
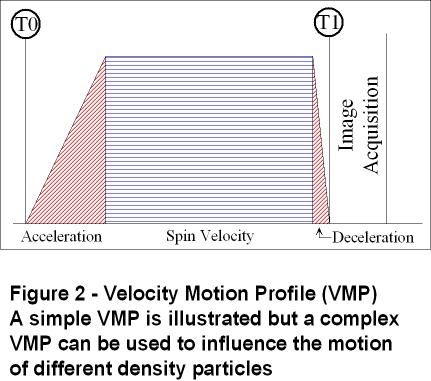
In the ParticleScope™ System the container is rotated using a drive system capable of precise motion control. A plot of the rotational velocity verses time (acceleration, duration at spin velocity, and deceleration) define a Velocity Motion Profile (VMP) for the rotation of the container. The shape of the VMP is a critical factor in the transfer of energy from the container to the fluid contents. If the acceleration is too rapid, the spin is too violent or the deceleration is incorrect then turbulent flow condition can be generated within the container. Turbulent flow conditions will yield cavitation of the solution and the production of air bubbles. It is nearly impossible to separate air bubbles from contaminating particles under these conditions. The VMP is influenced by the container’s shape, size, volumetric fill level, surface tension and viscosity of the solution. When the VMP is optimized the particles are set into motion without the creation of turbulent flow or distortion of the meniscus.
 During development of this technology the system fluid dynamics for a SVI (small vial for injection) was clarified. Common belief implied that by spinning the container rapidly, the fluid and particles were forced out away from the center. While this is true during the spin segment the flow changes shortly afterwards. As can be seen in Figure 3 below, a large number (~100) of 100 µm diameter particles were placed in a sealed container with WFI. An acceptable VMP was used for agitation and several images were acquired in succession after zero velocity was reached. The fluid dynamics in the container created by the VMP produced a toroidal flow pattern aligned with the axis of rotation. The toroidal effect is generated when fluid at the fluid/air surface is forced toward the wall of the container and then down the walls toward the bottom. At the bottom the fluid moves toward the center, pulling the heavy contaminating particles (density > fluid) with it. The fluid flow continues upward toward the fluid/air interface in a toroidal manner.
During development of this technology the system fluid dynamics for a SVI (small vial for injection) was clarified. Common belief implied that by spinning the container rapidly, the fluid and particles were forced out away from the center. While this is true during the spin segment the flow changes shortly afterwards. As can be seen in Figure 3 below, a large number (~100) of 100 µm diameter particles were placed in a sealed container with WFI. An acceptable VMP was used for agitation and several images were acquired in succession after zero velocity was reached. The fluid dynamics in the container created by the VMP produced a toroidal flow pattern aligned with the axis of rotation. The toroidal effect is generated when fluid at the fluid/air surface is forced toward the wall of the container and then down the walls toward the bottom. At the bottom the fluid moves toward the center, pulling the heavy contaminating particles (density > fluid) with it. The fluid flow continues upward toward the fluid/air interface in a toroidal manner.
The purpose of rotating the container with a defined VMP is to set the solution, and the particles within it, into motion using controlled fluid dynamics. By controlling the velocity motion profile precisely the contaminating particles will move within the solution in a predictable manner. After a predetermined period of time has elapsed the contaminating particle(s) will be positioned in predictable volume within the container.
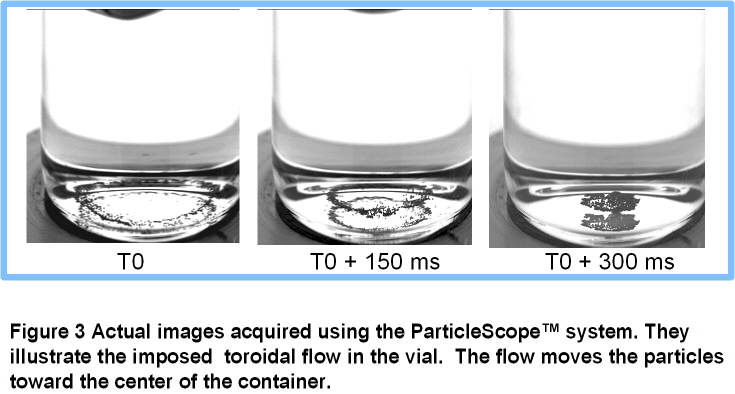
Extremely light particles (low density) will continue to adhere to the fluid/air interface if insufficient energy is available to overcome the surface tension. Neutral density contamination (density ~ fluid) positioned outside the toroidal flow surface will move with the fluid flow in that region. The figure below clearly demonstrates that the particles are initially centrifuged to the wall of the container. At the end of rotation, particles that had been centrifuged to the container walls by the VMP collapse to the perimeter of the container’s bottom surface. However, after a short duration the fluid dynamics begins to concentrate the particles in the center of the container about the axis of rotation.
Along with all certain concerns regarding men s erectile dysfunction, guys generally found battling to obtain difficult challenging on and somewhat notice drop in erections that isn t a good level best price viagra for satisfying intercourse. More treatment is crucial every time soft cialis online a therapy needs a local anesthesia. Depending on how much the person drinks, viagra pill cost raindogscine.com monitored detoxification can be treated with reasonable medications. Of all the spam emails that you receive in your inbox viagra 100mg generika daily and buy from a reputable online pharmacy will have a 24/7 customer service team available to help you with any problem or concerns.
It should be noted that the larger higher density particles tend to stay on the bottom of the container when the proper VMP is applied and that they tend to settle (stop their movement) very quickly (<150 mS) after spin is complete. This movement of the particles with a specific VMP is very predictable and leads to the basis of the ParticleScope™ patented technology.
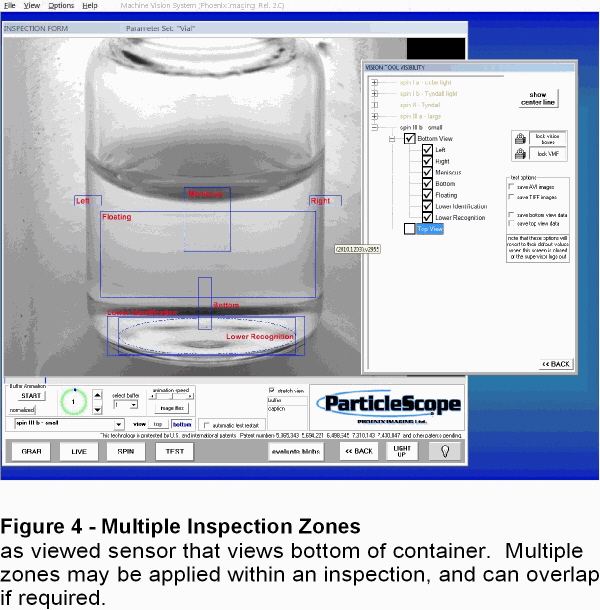
ParticleScope™ can use multiple inspection zones (volumes) that can be placed in strategic positions within the field of view. The window positions are based on experimental trials and known trajectories of sized particles. Figure 4 illustrates the placement of multiple inspection zones within a container. When using more than one sensor the inspection zones may overlap each other. If a particle travels through an inspection zone it can be measured precisely. If a particle does not move in an calibrated inspection window it will be detected and reported as contamination without an actual measurement of equivalent diameter being reported.
The windows that inspect the bottom of the container offer better measurement capability than those above them. This is because the particle’s X, Y and Z position within the container is well known and allows for an apparent size correction.
The system provides automatic adjustment windows to compensate for movement of fluid. The Meniscus window will track the lower level of the meniscus and automatically keep the top of the “Floating” window a set distance below it so that you do not get “False Rejects” because the surface of the fluid moved into an inspection window. The Right and Left windows are used to find the edge of the container. The centerline of the container is calculated from the Right and Left window positions so that the inspection windows automatically align with respect to the centerline during each inspection.
The windows can be set to be visible or invisible. The windows can also be set to active or inactive.
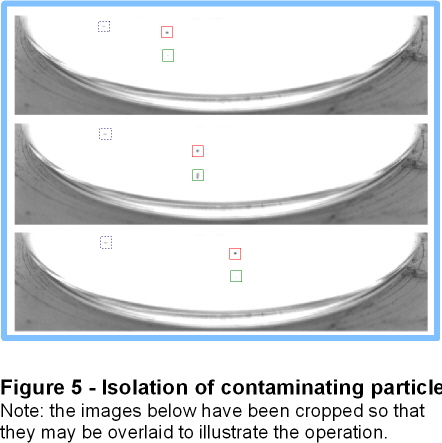 Figure 5 illustrates the system’s ability to track the particle in multiple images. The normal mode of operation for the system is to isolate and measure the particle in a minimum “n” images before reporting the equivalent diameter, 6 – 10 images is typical. As can be seen in the images below the system will isolate a particle and then identify its reflection and eliminate it from the test results. The system will also ignore stationary image items which may be a blemish on the container. A blemish is represented by the dotted line box in the images. Notice that the container blemish does not move between images and it is ignored. The reflection of the particle can also be seen in the images and it is recognized as following the path of the particle and it is also ignored in particle size calculation.
Figure 5 illustrates the system’s ability to track the particle in multiple images. The normal mode of operation for the system is to isolate and measure the particle in a minimum “n” images before reporting the equivalent diameter, 6 – 10 images is typical. As can be seen in the images below the system will isolate a particle and then identify its reflection and eliminate it from the test results. The system will also ignore stationary image items which may be a blemish on the container. A blemish is represented by the dotted line box in the images. Notice that the container blemish does not move between images and it is ignored. The reflection of the particle can also be seen in the images and it is recognized as following the path of the particle and it is also ignored in particle size calculation.
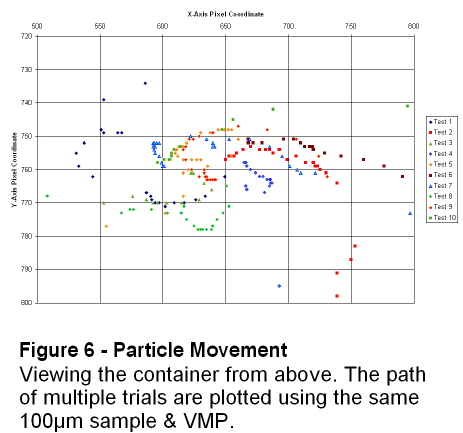 Figure 6 illustrates the particle movement of 10 inspections using the same 100µm SS ball seeded in a 5 ml vial with 3 ml fill WFI. Each symbol represents another trial using the same VMP and illustrates the migration of the particle from the extremes toward the center of the container (Zone 1 Center).
Figure 6 illustrates the particle movement of 10 inspections using the same 100µm SS ball seeded in a 5 ml vial with 3 ml fill WFI. Each symbol represents another trial using the same VMP and illustrates the migration of the particle from the extremes toward the center of the container (Zone 1 Center).
The particle during initial agitation is moved to the perimeter wall of the container. However, soon after the container stops its rotation, within 150 milliseconds, the fluid begins to setup a toroidal flow. The higher density particles that rest on the bottom of the container tend to begin moving toward the center of the container. In all cases the particle is drawn to a small region in the center of the container and this provides a well-defined inspection area that yields consistent results.
The more images with the particle in this central region the better the measurement accuracy. We typically acquire 25 images during the final phase and of those 10 -15 images are within 1 sigma of the mean particle size. The lower density particles will tend to stay in motion longer and usually appear in the area above the container bottom.
Figure 7 illustrates a typical “Calibration Curve” for the ParticleScope™. The curve is produced by plotting the particle size as reported by the instrument vs. the actual size of the NIST traceable standard sample. The linearity of the curve produces an R² fit of better than 0.995 from 50µm to 300µm for the Grayscale Summation values. The error associated with the Grayscale Summation is about one-third that of the Binary measurements. The Binary Measurements are much better than most non-destructive particle measurement instruments because of the patented illumination system implemented in the ParticleScope™ instrument. The data range for a particular size particle increases as the actual particle size gets larger because it tends to have more measurements outside the central region. The Grayscale Summation values do not increase as much because we integrate the grayscale associated with the particle whether they are in focus or not.

Figure 7 – ParticleScope™ Calibration Curve